技术成果简介
提出了远程操作机器人在信息传输通道上存在随机大时延和数据有丢失情况下、多种操作模式下的智能控制技术,保证机器人远程操作的稳定性和良好的操作性能。研制了可用于多种远程操作机器人的6自由度通用型异构式手控器,获得4项国家发明专利。构建了基于计算机网络的远程操作机器人实验平台,完成了抓取、移动、放置等典型作业任务。
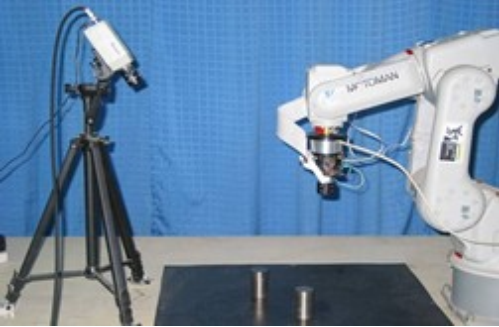
基于网络的远程操作机器人实验平台

柔性触觉感知装置

异构式机器人手控器手部转动装置

6自由度通用型异构式机器人手控器
技术成熟程度
研制阶段
成果所属领域
装备制造
意向合作方式
技术咨询;技术服务

