技术成果简介
主要的关键技术与创新点
① 提出基于开放式体系结构的网络化机器人控制器软、硬件结构与设计方案。该机器人控制系统充分体现了开放式和网络化的特点,实现了开发平台、操作系统和用户接口的标准化;提出了建立用户伺服算法并控制机器人的方法,实现了机器人底层控制的开放性;开发完成具有高度开放性的机器人软件系统;具有标准的网络通信接口与网络环境,支持标准的网络协议,可实现机器人远程操作与维护。
② 形成将普通工业机器人控制器升级为网络化机器人控制器的相关技术。针对COMAU机器人,构建了机器人与网络信息系统之间的信息交互平台,实现了其网络功能和相互间的信息快速传输、理解与变换。通过COMAU机器人网络化的成功实现及其应用,探索出了一条低成本的工业机器人网络化改造的途径,积累了技术,使得大量的服役期的机器人有可能从信息孤岛变成信息节点。
③ 建立了工业机器人的OPC服务器,形成多机器人生产线信息集成的相关技术。通用机器人OPC服务器的开发,使得监控系统软件更加独立于机器人硬件,开放性和可扩展性得到很大提高。不仅解决了项目中机器人信息的集成共享问题,推广应用给解决复杂设备或系统的信息集成提供了方法和工具。形成基于OPC服务器的机器人焊接生产线的可交互式远程监控技术。
④ 机器人焊接生产线的运动规划、离线编程和相关软件技术。该系统提供机器人建模、生产线场景建模、图形操作与渲染、焊接路径优化和碰撞检测、离线示教与计算机辅助编程等功能,并具有技术先进、开放性好、适应性强等特点,可用于多种不同类型机器人的离线编程与仿真,大大缩短了在线编程时间,提高了生产效率。
本项目的实施,将使我们能够掌握网络化焊接机器人控制器的硬件、软件设计和多机器人焊接生产线系统集成、离线编程和远程监控等方面成套技术的自主知识产权。提供的成套技术将解决汽车产业由传统制造技术向先进制造技术升级所面临的重大共性问题,因而对我省汽车行业的产业结构调整和技术升级进而对我省汽车工业的发展都具有重要的意义。
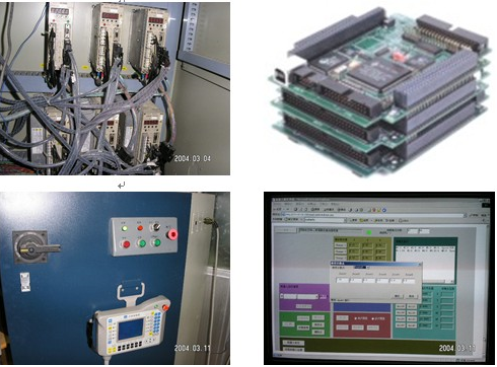
开发式网络化焊接机器人控制器
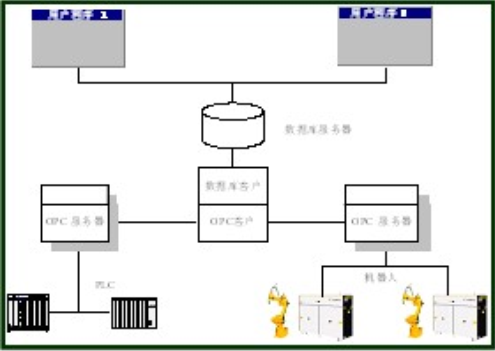
基于OPC技术的机器人焊接生产线监控系统结构

机器人焊接生产线运动规划与离线编程软件
技术成熟程度
研制阶段
成果所属领域
装备制造
意向合作方式
合作开发

