项目简介
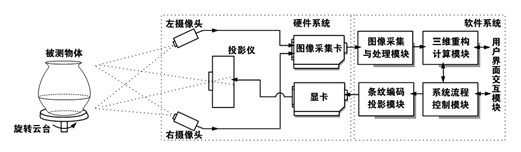
研究工业环境下基于影像反求的自动加工成型技术,即通过视频手段获取被测物体空间尺度坐标信息,将其转换成操控指令,在程控加工设备上快速成型,将视觉检测技术与快速加工技术相集成,建立一个面向高精密装备加工的自动检测与成型系统。本项目主要创新点如下:①建立基于影像反求的检测与控制重构模型。在既有视觉检测理论基础上,建立归一化的数学模型。该模型对视频采样数据进行模式识别与三维重构,获取加工物体的空间信息;②研究检测与控制的快速算法。基于本课题组既有研究基础,在工业系统的视觉检测中采用信息智能算法机理与优化方案,以拓展适用范围和增强鲁棒性;③将快速精密检测技术与程控加工技术相集成,利用视觉检测实现快速三维重构与反馈控制,在既有快速算法的研究基础上,研究设计满足工程实用要求的硬件处理模块,实现三维视觉检测技术与程控加工技术的有机结合,提升程控设备的自动化加工水平。
所属领域
装备制造
项目成熟度
研制阶段
合作方式
合作开发

